Debugging, application, and maintenance techniques for industrial control products,Such as Variable speed driver(VSD),Variable frequency driver(VFD),Industrial touch screen,Programmable Logic Controller(PLC),Servo Driver,servo motor,servo amplifier,Servo Controller,etc.
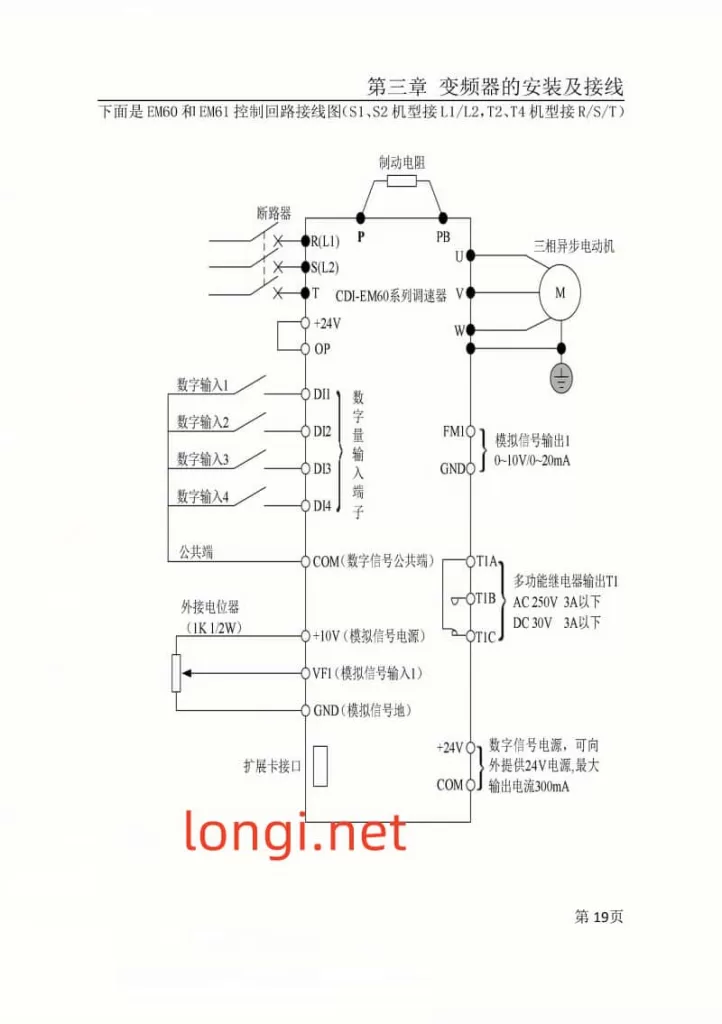
The CDI-EM60 and EM61 series variable frequency drives (VFDs) from Hangzhou Delixi boast robust functionalities in industrial control applications. This article delves into the external terminal start and external potentiometer speed control features of these inverters, alongside an overview of their password security and fault code analysis capabilities.
I. External Terminal Start
The CDI-EM60 and EM61 series VFDs support versatile starting methods, including keypad control, terminal control, and communication control. External terminal start is a popular and flexible method, triggering the inverter’s start and stop through external signals.
Setup Steps for External Terminal Start:
Parameter Configuration:
Set the P0.0.03 (Operation Control Mode Selection) to 1 for terminal control.
Adjust other relevant parameters such as acceleration/deceleration times and frequency sources as needed.
Wiring:
Connect external control signals to the corresponding input terminals of the inverter (e.g., DI1, DI2).
Ensure compatibility between the external signal source (e.g., pushbuttons, relay contacts) and the inverter input terminals.
Testing:
Power on and test if the external control signals correctly trigger the inverter’s start and stop.
Fine-tune parameters for a smooth start-up process.
Precautions:
Ensure external control signals adhere to the inverter’s electrical specifications.
Regularly inspect wiring for secure connections to prevent control failures.
II. External Potentiometer Speed Control
External potentiometer speed control adjusts the inverter’s output frequency by rotating an external potentiometer, thereby regulating motor speed.
Setup Steps for External Potentiometer Speed Control:
Parameter Configuration:
Set the P0.0.04 (Frequency Source Selection) to 2 (Keypad Potentiometer) or 1 (External Terminal VF1, if connecting the potentiometer to VF1).
Adjust parameters like maximum frequency and acceleration time to suit speed control requirements.
Wiring:
Connect the wiper, fixed terminal, and variable terminal of the potentiometer to the corresponding inverter terminals (e.g., VF1, GND).
Ensure the potentiometer’s electrical specifications match the inverter’s input requirements.
Testing:
Rotate the potentiometer and observe if the inverter’s output frequency varies accordingly.
Adjust the potentiometer’s rotation range and inverter parameters for optimal speed control.
Precautions:
Regularly check potentiometer connections for reliability to prevent speed instability.
Avoid sudden disconnection or short-circuiting of potentiometer wiring during inverter operation.
III. Password Settings and Decoding
The Delixi inverters offer password protection to restrict unauthorized parameter modifications.
Password Setup:
Access the Password Menu:
Navigate through the inverter’s keypad to the parameter setting interface.
Locate the password-related function code (e.g., P5.0.20) and enter the password setup menu.
Enter the Password:
Input a custom 5-digit password.
Confirm the password and save changes before exiting the setup menu.
Password Decoding and Recovery:
Decoding: Enter the correct password to lift password protection and regain full inverter control.
Password Recovery: If forgotten, contact the inverter supplier or manufacturer for unlocking or password reset.
IV. Fault Code Analysis
During operation, the Delixi inverters may display fault codes indicating the device’s status and fault types.
Err01: Overcurrent During Constant Speed. Possible causes include output circuit shorts or load surges. Inspect and resolve issues before restarting the inverter.
Err02: Overcurrent During Acceleration. Might stem from motor/circuit shorts or inadequate acceleration time. Adjust parameters or check wiring.
Err04: Overvoltage During Constant Speed. Verify input voltage and bus voltage readings.
Err07: Module Fault. Could indicate inverter module damage, requiring replacement or professional service.
Err10: Motor Overload. Check for motor blockage or excessive loads, adjust motor protection parameters, or reduce the load.
Consulting the inverter manual’s fault code table enables swift troubleshooting and ensures uninterrupted production.
In conclusion, the CDI-EM60 and EM61 series VFDs from Hangzhou Delixi excel in industrial control with their versatile starting mechanisms, precise speed regulation, robust security features, and intuitive fault diagnosis. Mastering these functionalities optimizes device performance and enhances operational safety.
When using ABB’s ACS series inverters, including ACS180, ACS530, ACS580, and ACS880, users may encounter the FAULT 7086 alarm code, which is not explicitly mentioned in the manuals for these models. This article delves into the reasons behind this alarm and provides comprehensive solutions to help users quickly identify and resolve the issue.
Background of FAULT 7086 Alarm
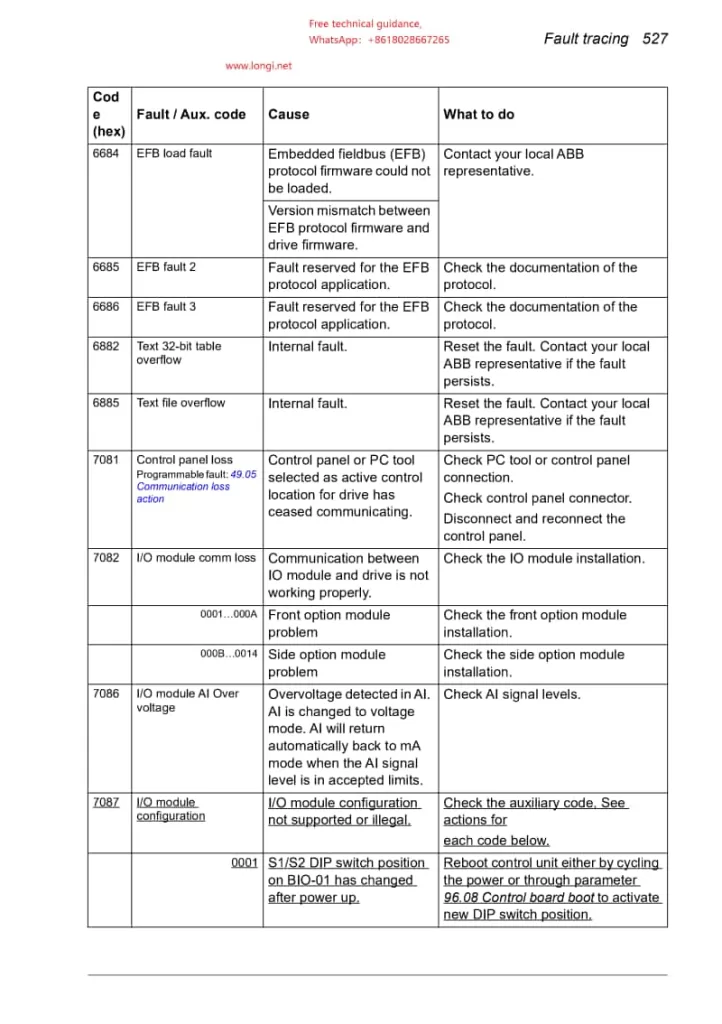
Although the operation manuals for ACS180, ACS530, ACS580, and ACS880 do not directly mention FAULT 7086, the explanation for this alarm code is found in the ACS380 (specifically designed for crane applications) manual. FAULT 7086 indicates “AI Overvoltage in I/O Module,” meaning that an overvoltage has been detected at the analog input (AI) port.
Cause Analysis
AI Port Overvoltage: When the input voltage at the AI port exceeds the set upper limit (typically 10VDC or a configurable value such as 7.5VDC), the inverter triggers the FAULT 7086 alarm to protect internal circuits from damage.
AI Signal Mode Change: If the AI signal level exceeds the acceptable range, the inverter may attempt to automatically switch the AI to voltage mode. If this fails, it will trigger the alarm.
Circuit Board Component Issues: Although the circuit board designs of ACS180, ACS530, ACS580, and ACS880 differ, they share a core control system. Issues with the mainboard, drive board connections, or related components can also lead to unexpected FAULT 7086 alarms.
Solutions
1.Check AI Voltage:
(1)Use a multimeter to measure the actual input voltage at the AI port and confirm if it exceeds the set upper limit.
(2)Adjust the AI port’s voltage upper limit setting, if necessary, to suit the current operating 2.environment.
(1)Inspect External Connections:
Verify that the external signal source for the AI port is normal, with no abnormal fluctuations or damage.
(2)Check the connection cables and plugs for the AI port to ensure they are securely connected and free from looseness.
3.Examine Circuit Boards and Modules:
(1)If suspecting a circuit board or module failure, first inspect the cables and plugs between the mainboard and drive board, cleaning dust and ensuring good contact.
(2)If possible, try replacing suspected circuit boards or modules to verify if the issue is resolved.
4.Refer to Relevant Documentation:
(1)Although the ACS180, ACS530, ACS580, and ACS880 manuals do not directly mention FAULT 7086, refer to the ACS380 manual for more information on handling AI overvoltage.
(2)Contact our technical team for free technical consultation and assistance
5.Reset the Inverter:
After ruling out external hardware issues, attempt to reset the inverter to see if the alarm clears.
Conclusion
The FAULT 7086 alarm in ACS series inverters, including ACS180, ACS530, ACS580, and ACS880, can occur under specific circumstances not directly mentioned in their manuals. By thoroughly analyzing the alarm’s background and causes, and implementing appropriate solutions, users can effectively identify and resolve the issue. During the process, ensure safe operation and back up important data to prevent unexpected losses.
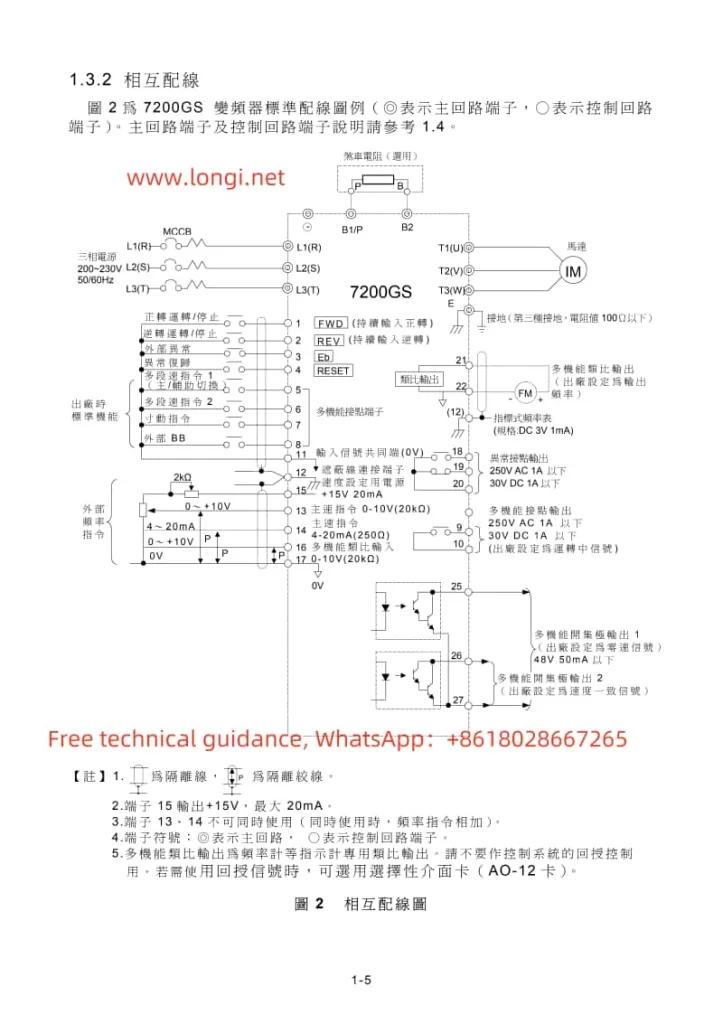
The TECO Inverter 7200GS, as a high-performance universal inverter, is widely used in industrial automation due to its support for various control modes including V/F control, Sensorless Vector Control, PID energy-saving control, and V/F+PG closed-loop control. This article will provide a detailed introduction to key operations of the TECO Inverter 7200GS, including panel startup, frequency speed regulation, password function setup and unlocking, as well as fault code analysis.
I. Panel Startup
1. Inspection and Preparation
Verify the Inverter Installation Environment: Check if the surrounding temperature, humidity, and ventilation conditions meet the requirements, ensuring no corrosive gases or dust.
Electrical Inspection: Ensure all electrical connections, particularly the input/output power supply and motor connections, are correct.
2. Power-On Startup
Connect the main power supply to the inverter. The “CHARGE” indicator light will illuminate, indicating that the internal capacitor is charging.
Once the “CHARGE” indicator light goes out, it means charging is complete, and the inverter is ready for operation.
3. Panel Operation
Use the standard LCD or LED operator panel to switch to the “DRIVE” mode.
Press the “RUN” button to start the inverter, and the motor will subsequently operate.
II. Panel-Set Frequency Speed Regulation
1. Enter Frequency Setting Mode
In the “DRIVE” mode, navigate to the frequency setting interface using the number keys and direction keys on the panel.
Use the direction keys to select the “Frequency Command” option and input the desired frequency value using the number keys.
2. Speed Regulation Operation
After entering the frequency value, press the “ENTER” key to confirm, and the inverter will adjust the motor speed according to the set frequency value.
Smooth speed regulation can be achieved by continuously changing the frequency value.
III. Password Function Setup and Unlocking
1. Password Setup
With the inverter stopped, enter the parameter setting mode through the panel.
Locate the parameter related to password setup (e.g., Sn-xx) and input the desired password value according to your needs.
Save the parameter settings and exit the setup mode after completing the password setup.
2. Password Unlocking
To unlock a set password protection, re-enter the parameter setting mode.
Input the correct password value, save, and exit the setup mode to remove the password protection.
IV. Fault Code Analysis
1. UV1 (Under Voltage)
Fault Description: The DC main circuit voltage is too low during operation.
Possible Causes: Insufficient power supply capacity, voltage drop in wiring, improper inverter power supply voltage selection, etc.
Countermeasures: Check the power supply voltage and wiring, verify the power supply capacity and system, install an AC reactor, etc.
2. OC (Over Current)
Fault Description: The inverter output current exceeds 200% of the rated current.
Possible Causes: Short acceleration time, short circuit or grounding at the output terminals, motor capacity exceeding the inverter capacity, etc.
Countermeasures: Extend the acceleration time, check the output terminal wiring, replace the inverter with an appropriate capacity, etc.
3. OL3 (Over Load)
Fault Description: Excessive output torque triggers the over-torque protection.
Possible Causes: Abnormal mechanical load, improper over-torque detection level settings, etc.
Countermeasures: Inspect the mechanical operation, set an appropriate over-torque detection level, etc.
4. PG0 (PG Disconnection)
Fault Description: Disconnection of the PG (encoder) signal.
Possible Causes: Poor contact or disconnection in the PG wiring.
Countermeasures: Check the PG wiring to ensure proper contact.
V. Conclusion
The TECO Inverter 7200GS, as a powerful inverter, offers flexible speed regulation, startup, and protection functions. Through this article, users can better understand and master key operations such as panel startup, frequency speed regulation, password settings, and fault code analysis, thereby enhancing equipment efficiency and stability. In practical applications, users should configure inverter parameters according to specific needs and environmental conditions to ensure proper operation.
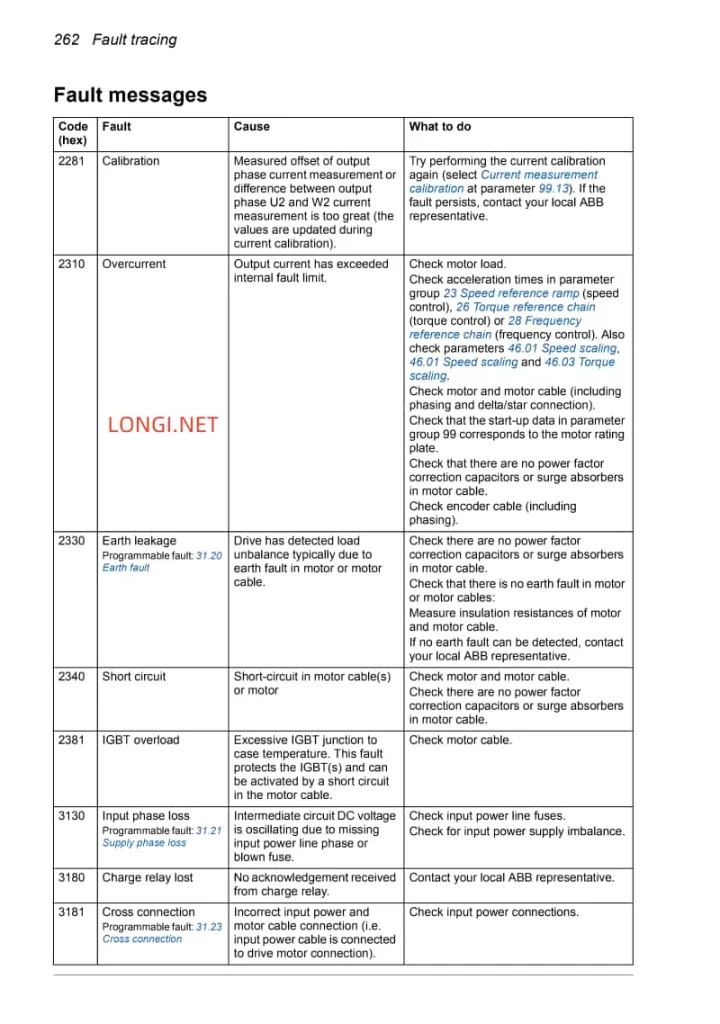
The ACS530 series inverter from ABB, a leading player in industrial automation, is widely utilized across various industries. However, during operation, users may encounter various fault alarms, with fault code 2310 being a common one, indicating an overcurrent fault. Based on the provided documentation, this article delves into the causes and corresponding solutions for ABB Inverter ACS530 series alarm 2310.
I. Causes of Fault 2310
1. Excessive Motor Load
When the motor load exceeds its rated capacity, it can lead to a sharp increase in current, triggering the overcurrent protection. This may be due to an overly heavy load driven by the motor, mechanical jams, or motor stalls.
2. Incorrect Inverter Parameter Settings
The parameter settings of the inverter significantly impact its operational performance. Improper settings for acceleration time, deceleration time, or low current limits and overload protections can cause excessive current during motor startup or operation, resulting in an overcurrent alarm.
3. Unstable Power Supply Voltage
Fluctuations in power supply voltage directly affect the output voltage and current of the inverter. Unstable power supply can prevent the inverter from operating steadily, causing the output current to exceed normal ranges and trigger the overcurrent protection.
4. Motor or Cable Faults
Internal motor shorts, open windings, or grounding faults in motor cables can lead to excessive current. Additionally, contactors in the motor cable that are opening or closing can generate instantaneous high currents during switching, causing an overcurrent alarm.
5. Internal Inverter Faults
Damage or aging of internal components such as power modules, drive circuits, or current detection circuits in the inverter can result in unstable output currents, triggering an overcurrent alarm.
II. Solutions
1. Check Motor Load
First, inspect if the motor’s driven load is excessive. If so, attempt to reduce the load or replace the motor and inverter combination with higher capacities. Additionally, check for mechanical jams or stalls and address them promptly.
2. Review and Adjust Inverter Parameters
Examine the inverter’s parameter settings, particularly acceleration time, deceleration time, current limits, and overload protections. Ensure these settings are appropriate for the motor’s actual operational requirements. Adjust them if found to be incorrect.
3. Stabilize Power Supply Voltage
Use a multimeter or similar tools to check the stability of the power supply voltage. If significant fluctuations are present, implement measures to stabilize it, such as installing voltage stabilizers or UPS systems.
4. Inspect Motor and Cables
Examine the motor and motor cables for faults. Check for short circuits or open windings in the motor, verify the insulation resistance of the cables, and ensure no power factor correction capacitors or surge absorbers are present in the cables that could contribute to abnormal currents.
5. Check Internal Inverter Components
If all the above checks are normal, the overcurrent alarm may be due to internal inverter component damage. Contact professional technicians for inspection or replacement of faulty internal components.
III. Preventive Measures
To avoid the occurrence of ABB Inverter ACS530 series fault 2310, adopt the following preventive measures:
Regular Inspections and Maintenance: Conduct periodic inspections and maintenance of the motor and inverter to ensure their smooth operation.
Appropriate Parameter Settings: When setting inverter parameters, base them on the motor’s actual conditions to prevent incorrect settings from causing overcurrent faults.
Stable Power Supply Voltage: Maintain stable power supply voltage to prevent its fluctuations from affecting the inverter’s performance.
Suitable Motor and Inverter Selection: Choose motors and inverters that match the actual load requirements to prevent overcurrent faults due to excessive loads.
In conclusion, ABB Inverter ACS530 series fault 2310 is a critical fault alarm that requires attention. By thoroughly examining motor loads, adjusting inverter parameters, stabilizing power supply voltage, inspecting motors and cables, and checking internal inverter components, this issue can be effectively resolved, ensuring the inverter’s smooth operation. Furthermore, implementing preventive measures can reduce the likelihood of overcurrent faults and enhance the reliability and stability of the equipment.
The ABB ACS880 series inverters are widely used in industrial applications due to their high performance and reliability. However, issues can arise, especially when driving high-power motors. One such challenging fault is **Fault 2340**, which is related to motor cable or motor short circuits and IGBT module malfunctions. This article will analyze the potential causes of Fault 2340 and provide a troubleshooting guide to resolve it.
1. Fault Symptoms
In a real-world scenario, an ABB ACS880 inverter was used in a common DC bus system to drive a 1150HP motor. During startup, Fault 2340 occurred intermittently—about two to three times out of ten attempts. After thorough inspection, the motor insulation was found to be normal, ruling out motor and motor cable issues as the root cause.
2. Analysis of Causes for Fault 2340
(1)Motor Cable Insulation Issues: While the motor insulation was normal in this case, it’s essential to consider the possibility of phase-to-phase or phase-to-ground insulation issues in the motor cables, which could lead to Fault 2340. Though this is less likely, it should not be overlooked during troubleshooting.
(2)IGBT Module and Gate Driver Board Issues: The IGBT module is a critical component in the inverter. Faulty signals from the gate driver board of the IGBT module are a common cause of Fault 2340. This issue has a high probability and often requires replacing the IGBT module to resolve.
(3)Connection Issues Between IGBT Module and Interface Board**: If the ribbon cables connecting the IGBT module to the interface board are damaged or have high resistance, Fault 2340 may occur. This issue is moderately probable and should be addressed by thoroughly inspecting the connections.
(4)Interface Board Fault**: The interface board transmits control signals to the IGBT module. A malfunctioning interface board can also trigger Fault 2340. This issue is moderately likely and should be considered if other checks do not resolve the fault.
1. Fault Symptoms
In a real-world scenario, an ABB ACS880 inverter was used in a common DC bus system to drive a 1150HP motor. During startup, Fault 2340 occurred intermittently—about two to three times out of ten attempts. After thorough inspection, the motor insulation was found to be normal, ruling out motor and motor cable issues as the root cause.
2. Analysis of Causes for Fault 2340
(1)Motor Cable Insulation Issues: While the motor insulation was normal in this case, it’s essential to consider the possibility of phase-to-phase or phase-to-ground insulation issues in the motor cables, which could lead to Fault 2340. Though this is less likely, it should not be overlooked during troubleshooting.
(2)IGBT Module and Gate Driver Board Issues: The IGBT module is a critical component in the inverter. Faulty signals from the gate driver board of the IGBT module are a common cause of Fault 2340. This issue has a high probability and often requires replacing the IGBT module to resolve.
(3)Connection Issues Between IGBT Module and Interface Board**: If the ribbon cables connecting the IGBT module to the interface board are damaged or have high resistance, Fault 2340 may occur. This issue is moderately probable and should be addressed by thoroughly inspecting the connections.
(4)Interface Board Fault**: The interface board transmits control signals to the IGBT module. A malfunctioning interface board can also trigger Fault 2340. This issue is moderately likely and should be considered if other checks do not resolve the fault.
(1)Initial Inspection**:
– Use a multimeter to measure the diode characteristics between the inverter output terminals (U, V, W) and the DC bus terminals (R+, R-) to ensure they match expected values.
– Perform an insulation test on the motor and its cables to confirm there are no short circuits or grounding issues.
– Inspect the inverter for signs of moisture, condensation, or burn marks.
(2)Component Replacement**:
– If initial inspections reveal no issues, consider replacing the AINT board (interface board) to see if the fault is resolved.
– If the fault persists, disassemble the inverter and replace the IGBT module. During this process, carefully inspect all connections to ensure there are no loose or broken wires.
(3)Further Diagnosis**:
– If replacing the IGBT module and interface board does not resolve the issue, check and replace the current sensors and brake chopper IGBT.
– Throughout the process, handle all components with care, especially during reassembly, to prevent introducing new issues, such as poor connections or short circuits.
4. Conclusion
Fault 2340 in the ABB ACS880 inverter is a complex issue with multiple potential causes, ranging from motor cable insulation problems to IGBT module failures. Effective troubleshooting requires a thorough understanding of the inverter’s components and a methodical approach to diagnosing and repairing the fault. By following the steps outlined in this guide, technicians can systematically address and resolve Fault 2340, ensuring the reliable operation of the inverter.
The user went to a hardware and electrical store to buy a thermometer for automatic temperature control of the material tank in the production workshop. The control requirements put forward by the user are: when the temperature of the material tank is as low as 25 º C, start the boiler fan to heat it up; when the temperature of the material tank rises to 32 º C, stop the fan. The temperature is not required to be precisely controlled at one point, but it can be roughly maintained between 25 º C and 32 º C. In this way, the fan does not need to be started frequently and run for a long time, and the power saving effect will be very good. It is said that after searching several electrical and mechanical stores, no suitable temperature control meter can be found. If it can be solved here, it doesn’t matter if the price is a little higher, and five or six units can be purchased at once.
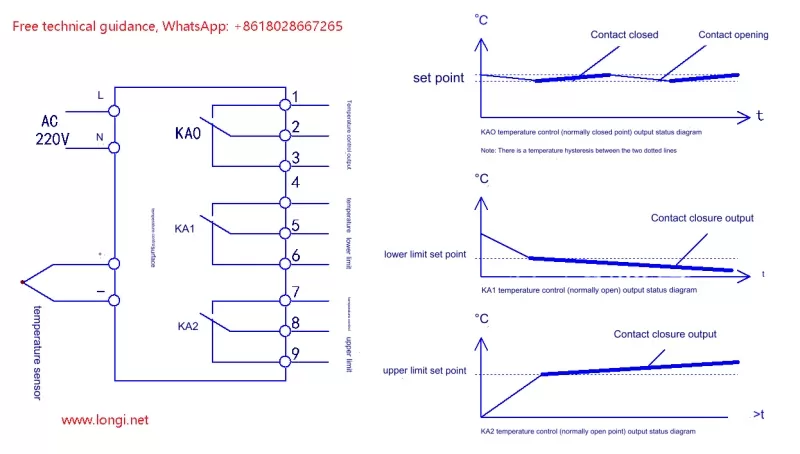
The father and son run the hardware and electrical store. The father is an old electrician, and the son is a student of the Department of Mechanical and Electrical Engineering, with top grades. The father and son were excited and decided to make this deal. The temperature controllers in the store generally have the following functions, see the wiring diagram below:
Figure 1: Temperature control meter wiring and three sets of contact output status diagram
From the wiring diagram, the temperature controller has three groups of output control contacts. KA0 is the control temperature output. If its normally closed point is used as the control output, the contact closing and opening action area is near the temperature setting point. For example, if the setting point is 25 º C, when the measured temperature rises to 25 º C, the normally closed contact is disconnected, and when the measured temperature drops to 23 º C, the contact is closed. This control method belongs to “point” control. The action of the relay tracks a temperature setting point. Although in order to avoid frequent switching at one point, there is often a temperature hysteresis value in the middle, such as 2 º C between 23 º C and 25 º C. Some models have this hysteresis fixed, while others are adjustable, but the temperature difference adjustment range is not too large. Obviously, the control output contact of KA0 cannot meet the control requirements put forward by users.
Let’s look at the output contact of KA1, which is the lower limit control output. It is also output based on a “temperature point”. When the measured temperature reaches the preset lower limit, KA1 will act. As long as it is within the lower limit, KA1 will maintain the output. Only when the measured temperature is higher than the lower limit setting point, KA1 will lose power and the contact will be released. The control requirements cannot be achieved by relying solely on the control contacts of KA1. The output contact of KA2 is the upper limit setting point. Its control principle is the same as that of KA1. It can also be regarded as a “point” control and cannot complete the control task independently.
My son suddenly had an idea: Is it possible to combine the lower limit and upper limit control outputs to meet the control requirements proposed by the user?
Dad nodded approvingly: Okay, I thought so too, let’s try to analyze it.
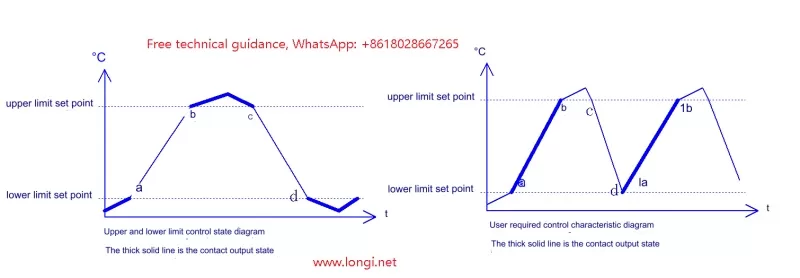
See the following control state diagram of KA1 and KA2 output combination and user control requirement diagram:
Figure 2: Upper and lower limit control states and user required control characteristic diagram
My son said: By connecting the normally closed points of the two relays KA1 and KA2 in series, the fan can be powered on and operated in the area where the two relays are not operating. That is, the fans in sections a and b in the figure can be powered on and operated. Doesn’t this meet the requirements?
Dad said: It seems not to work. The fan is also powered in sections c and d. The fan is powered and running most of the time. The fan stops only when it is outside the upper and lower limits. It still doesn’t work to use the two contacts directly. The user’s requirements are shown in the right figure of Figure 2. Only the thick line segments (a, b/1a, 1b) in the right figure are the time for the fan to run. When the detected temperature reaches the lower limit, the fan runs, and when it reaches the upper limit, the fan stops; then the temperature drops and reaches the lower limit again, the fan starts running again. The fan does not run at one “point”, but only runs on “segments” a and b, achieving a good power saving effect.
My son said: I didn’t notice the c and d segments in the left figure. It’s not possible. But we can use the upper and lower limit contact outputs and add an external control circuit to achieve it. This additional circuit should not be difficult to make.
The father wanted to test his son’s level, so he said: How about this, let’s both make an external control circuit, and see who’s circuit is simpler and more reasonable, and then we’ll use their circuit, okay?
The son knew that his father wanted to test his ability and it was also a small challenge for him. He thought that since he had worked on some complicated electromechanical control circuits, this small circuit should be no problem for him. So he readily agreed.
It seems to be a simple thing to think about, but in practice, this small function is not so easy to achieve. It seems that it cannot be completed with two additional relays, and the circuit is too complicated to use three relays. According to my father’s idea, it should be possible to achieve it with two additional relays. It seems that it cannot complete the task if one contact of KA1 and KA2 is used.
The son spent half a day drawing several diagrams, optimizing and simplifying the circuit, and finally succeeded through wiring tests. However, the analysis from the control principle was a bit confusing. The father frowned and thought about it at first, but suddenly grabbed a pen and drew a wiring diagram in no time. Without wiring tests, he announced that the circuit would definitely work.
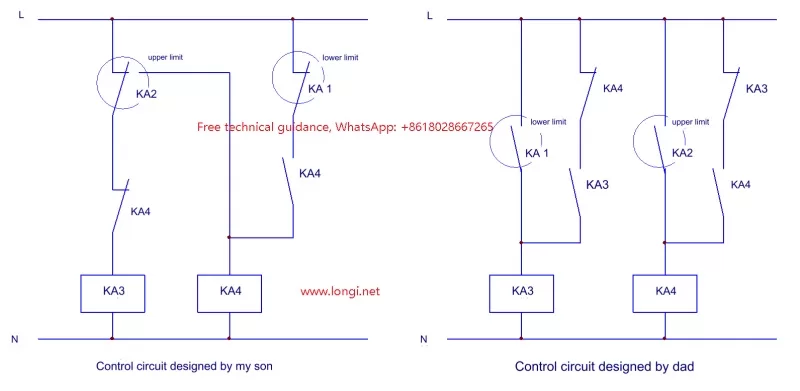
The control circuit diagram made by the father and son is as follows:
In the figure, KA1 and KA2 are the upper and lower limit signal output relays inside the temperature control meter, KA3 and KA4 are external relays, and KA3 provides control signal output. The control circuit designed by my son uses the normally open and normally closed contacts of the upper limit relay, the normally closed contacts of the lower limit relay, and two sets of contacts of KA4. The control process is as follows: After the equipment is powered on, the normally closed contact circuit of KA2 and KA4 provides power to the KA3 coil, KA3 is energized, the fan runs, and the discharge tank begins to heat up; when the temperature reaches the upper limit, the normally closed point of KA2 is disconnected, the normally open point is connected, KA3 loses power, and at the same time KA4 is energized for self-protection, the fan stops, and the discharge tank begins to cool down; due to the self-protection effect of KA4, when the temperature drops below the upper limit, KA4 maintains an energized state through the normally closed point of KA1 and its own self-protection contact, and KA3 maintains a de-energized state, and the temperature of the discharge tank continues to drop until it reaches the lower limit of the temperature, the KA1 lower limit relay is activated, the KA4 self-protection circuit is disconnected, KA4 loses power, KA3 is energized again, and the fan runs.
The control circuit designed by my father seems to be simpler. The circuit is clear in principle and is more convenient for analyzing the control process: when the temperature of the unloading tank reaches the lower limit, KA3 is energized and forms a self-protection (self-locking) circuit through the normally closed point of KA4 and the normally open point of KA3, and the fan runs; when the temperature reaches the upper limit, the normally open point of the upper limit relay KA2 is connected, KA4 is energized, and while disconnecting the self-locking circuit of KA3, it forms its own self-locking circuit through the normally closed point of KA3 and the normally open point of KA3. KA4 remains energized, KA3 remains de-energized, and the fan stops; when the temperature drops to the lower limit of the temperature, the relay KA1 is activated, KA3 is activated, and while disconnecting the self-locking circuit of KA4, KA3 forms its own self-locking circuit, and the fan starts running again.
The focus of control requirements is to meet two conditions:
1. Once KA3 and KA4 are powered, they can be self-protected (self-locked);
2. When two relays are powered on for self-protection, the self-protection circuit of relay B must be disconnected to make it lose power. The same is true in reverse.
This control method is not conventional temperature point control, but temperature range control, which can be regarded as a special application.
Both the son’s and the father’s circuits can accomplish the task, and use the same number of contacts, but the father’s circuit is easier to understand and more classic. The son’s circuit also accomplishes the task well, which is rare.
Dad said: I thought of these two conditions, and based on these conditions, I formed this circuit in the computer. It was a waste of effort before the logical relationship of the circuit was clear.
Although the son has figured out the circuit, it seems that his father is still better in terms of circuit routing and principle analysis. His father’s circuit is more “smooth”, while my own circuit is a bit tortuous. When you make a circuit yourself, you should be better at analyzing the logical relationship and take a “smooth” path to make the circuit more optimized and reasonable.
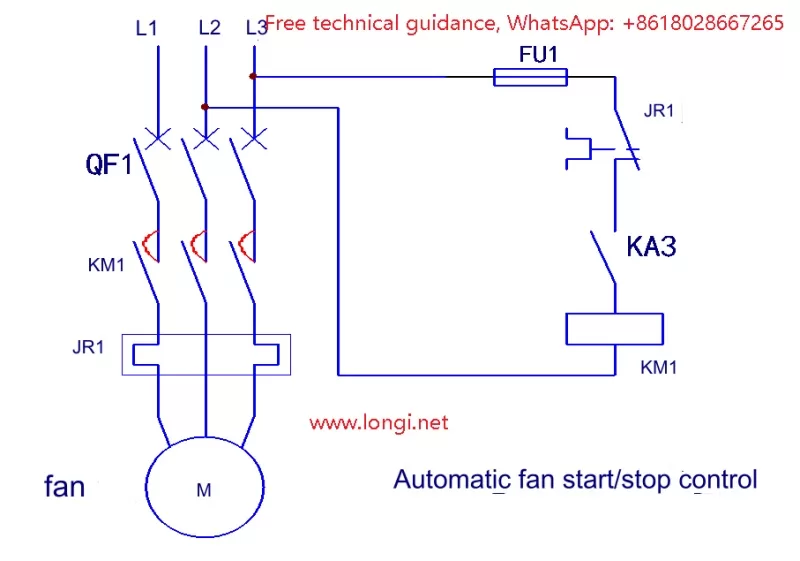
The fan control wiring diagram is as follows:
In the figure, KA1 and KA2 are the upper and lower limit signal output relays inside the temperature control meter, KA3 and KA4 are external relays, and KA3 provides control signal output. The control circuit designed by my son uses the normally open and normally closed contacts of the upper limit relay, the normally closed contacts of the lower limit relay, and two sets of contacts of KA4. The control process is as follows: After the equipment is powered on, the normally closed contact circuit of KA2 and KA4 provides power to the KA3 coil, KA3 is energized, the fan runs, and the discharge tank begins to heat up; when the temperature reaches the upper limit, the normally closed point of KA2 is disconnected, the normally open point is connected, KA3 loses power, and at the same time KA4 is energized for self-protection, the fan stops, and the discharge tank begins to cool down; due to the self-protection effect of KA4, when the temperature drops below the upper limit, KA4 maintains an energized state through the normally closed point of KA1 and its own self-protection contact, and KA3 maintains a de-energized state, and the temperature of the discharge tank continues to drop until it reaches the lower limit of the temperature, the KA1 lower limit relay is activated, the KA4 self-protection circuit is disconnected, KA4 loses power, KA3 is energized again, and the fan runs.
The control circuit designed by my father seems to be simpler. The circuit is clear in principle and is more convenient for analyzing the control process: when the temperature of the unloading tank reaches the lower limit, KA3 is energized and forms a self-protection (self-locking) circuit through the normally closed point of KA4 and the normally open point of KA3, and the fan runs; when the temperature reaches the upper limit, the normally open point of the upper limit relay KA2 is connected, KA4 is energized, and while disconnecting the self-locking circuit of KA3, it forms its own self-locking circuit through the normally closed point of KA3 and the normally open point of KA3. KA4 remains energized, KA3 remains de-energized, and the fan stops; when the temperature drops to the lower limit of the temperature, the relay KA1 is activated, KA3 is activated, and while disconnecting the self-locking circuit of KA4, KA3 forms its own self-locking circuit, and the fan starts running again.
The focus of control requirements is to meet two conditions:
1. Once KA3 and KA4 are powered, they can be self-protected (self-locked);
2. When two relays are powered on for self-protection, the self-protection circuit of relay B must be disconnected to make it lose power. The same is true in reverse.
This control method is not conventional temperature point control, but temperature range control, which can be regarded as a special application.
Both the son’s and the father’s circuits can accomplish the task, and use the same number of contacts, but the father’s circuit is easier to understand and more classic. The son’s circuit also accomplishes the task well, which is rare.
Dad said: I thought of these two conditions, and based on these conditions, I formed this circuit in the computer. It was a waste of effort before the logical relationship of the circuit was clear.
Although the son has figured out the circuit, it seems that his father is still better in terms of circuit routing and principle analysis. His father’s circuit is more “smooth”, while my own circuit is a bit tortuous. When you make a circuit yourself, you should be better at analyzing the logical relationship and take a “smooth” path to make the circuit more optimized and reasonable.
The main circuit of the inverter is a voltage-type, AC-DC energy conversion inverter. Since there is a large-capacity capacitor energy storage circuit between the rectifier and inverter circuits, and the voltage across the capacitor cannot change suddenly, in the initial power-on stage, the capacitor device is equivalent to a “short circuit”, which will form a huge surge charging current, which will cause a large current impact on the rectifier module and cause it to be damaged, and will also cause the air circuit breaker connected to the inverter power supply end to trip due to overcurrent.
The conventional processing method is to connect a current limiting resistor and a charging contactor (relay) in series between the rectifier and the capacitor energy storage circuit. The control of the capacitor charging process is as follows:
When the inverter is powered on, the charging resistor first limits the current of the capacitor to suppress the maximum charging current. As the charging process extends, the charging voltage gradually builds up on the capacitor. When the voltage amplitude reaches about 80% of 530V, two control processes occur. One is that the switching power supply circuit of the inverter starts to oscillate. The 24V output of the switching power supply directly drives the charging relay, or the relay connects the coil power supply circuit of the charging contactor. The charging contactor (relay) is closed. When the charging current limiting resistor is short-circuited, the inverter enters the standby working state. After a certain voltage is established on the capacitor, its charging current amplitude is greatly reduced, and the closing/switching current of the charging contactor is not too large. After that, the power supply of the energy storage capacitor circuit and the inverter circuit is supplied by the closed contactor contacts, and the charging resistor is short-circuited by the normally open contact of the contactor. The second is that as the charging voltage on the capacitor is established, the switching power supply starts to oscillate, and the CPU detects the voltage amplitude signal sent by the DC circuit voltage detection circuit, determines that the charging process of the energy storage capacitor has been completed, and outputs a charging contactor action instruction. The charging contactor is powered on and closed, and the capacitor charging process ends.
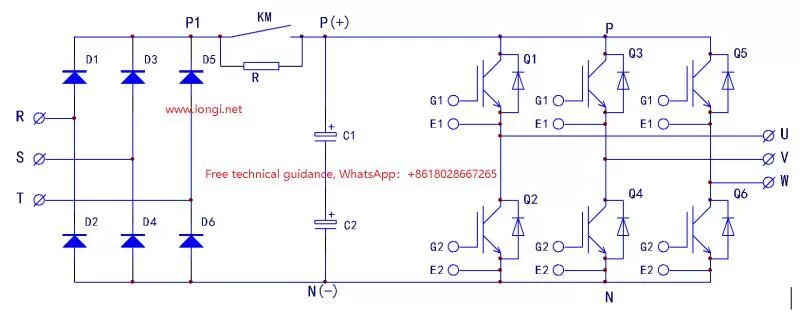
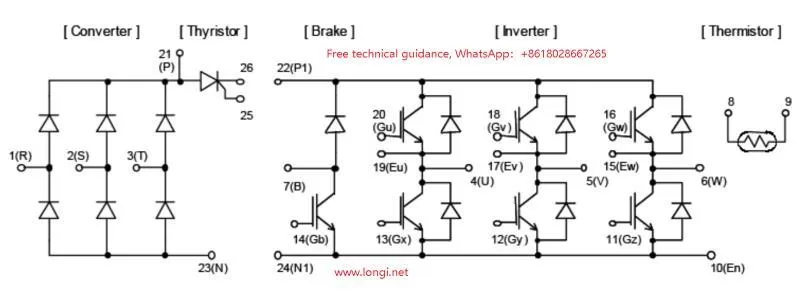
The common main circuit forms of the inverter and the charging contactor control circuit are shown in the figure below:
Figure 1: Common types of inverter main circuits
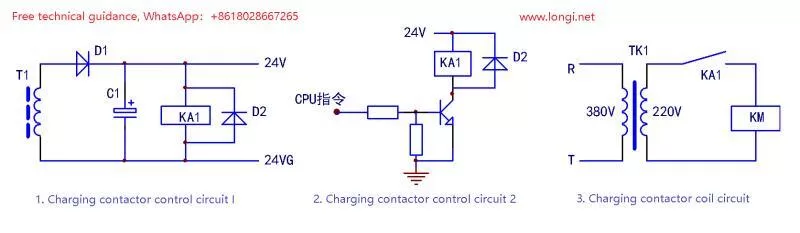
Figure 2: Control circuit of charging contactor
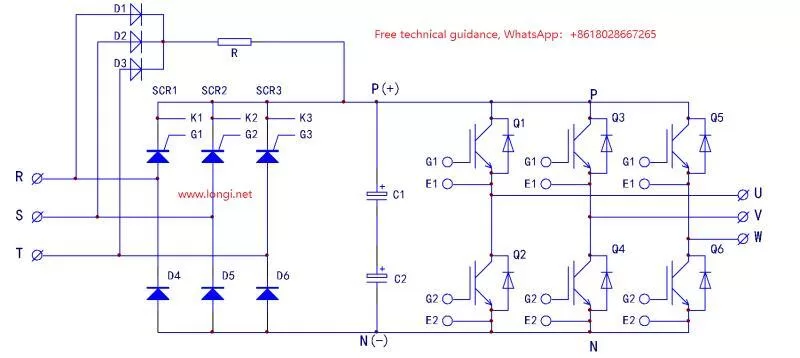
For some inverters and high-power inverters, the rectifier circuit often adopts a three-phase half-controlled bridge circuit, that is, the lower three arms of the three-phase rectifier bridge are rectifier diodes, and the upper three arms use three unidirectional thyristors, using thyristors as “contactless switches” to replace charging contactors. This saves installation space and improves circuit reliability. The circuit form is shown in the figure below:
Figure 3: Control circuit of charging contactor
Although the charging contactor is omitted, the working principle is the same, but the control circuit is different. During the power-on period of the inverter, D1 ∽ D6 is used for rectification, and R is used for current limiting to charge C1 and C2. When the charging process is close to the end, the CPU outputs the opening instruction of the three thyristors SCR1 ∽ SCR3, and the control circuit forces the three thyristors to conduct. The power-on pre-charging circuit composed of D1, D2, D3, and R is used. SCR1 ∽ SCR3 and D4, D5, and D6 form a three-phase rectifier bridge. At this time, the thyristor is in a fully conductive state, which is equivalent to a rectifier diode.
The opening of the thyristor requires two conditions: 1. The positive voltage between the anode and the cathode; 2. A trigger current loop is formed between K and G. The circuit is connected to the three terminals of the AC input power supply to provide unidirectional controlled rectification. During the three positive half-wave voltages of the three-phase AC power, if the trigger current is formed at the same time, the three thyristors can be opened. The first condition has been formed naturally, and the second condition is sufficient to control its opening.
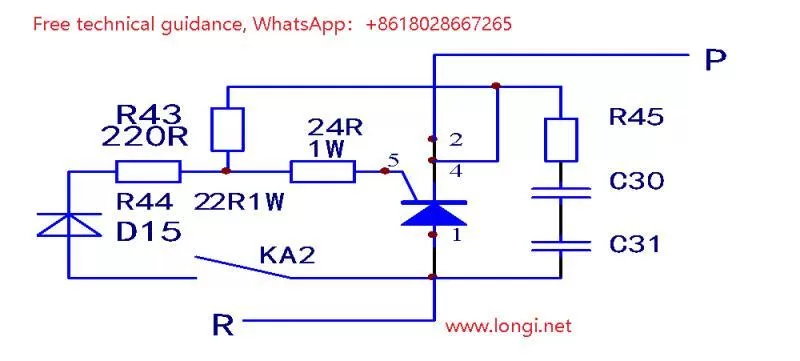
To put it simply, as long as a trigger current (pulse or DC) is provided to the thyristor during the period when the thyristor is subjected to a forward voltage – when the AC voltage passes through zero, the thyristor can be turned on well during the positive half-wave of the AC power and rectify the input AC voltage (just like a diode). The simplest trigger circuit is to introduce a resistor from the anode to the G pole, and during the positive half-wave of the AC power (after the zero point), the trigger current is synchronously introduced to the thyristor to turn on the thyristor. For example, the main circuit form of Dongyuan 300kW inverter is the same as Figure 3, and the trigger circuit is relatively simple:
Figure 4: SCR trigger control circuit 1
Figure 4 is one of the thyristor trigger circuits. The other two trigger circuits are the same. The components R45, C30, C31 and other components connected in parallel at the anode and cathode of the two thyristors are peak voltage absorption networks to provide overvoltage protection for the thyristors. The KA2 contact, D15, R44, and 24R form a trigger current path. The function of D15 is to rectify the input voltage half-wave to prevent the thyristors G and K from being subjected to the impact of reverse trigger voltage/current. R44 and 24R are current limiting resistors to limit the peak trigger current and protect the safety of the thyristors. R43 is a noise elimination resistor to increase the reliability of the thyristor operation.
When the CPU issues a thyristor on command, relay KA2 is powered on and closed, a positive half-wave voltage is input, rectified by D15, limited by R44 and 24R, flows into the G pole of the thyristor, and flows out from the K pole, forming a trigger current path, and the thyristor is turned on. The thyristor in the circuit is not in the voltage regulation working area, the conduction angle is the largest, and it is in the “full conduction state”, just like a switch device, only in the two states of conduction and cutoff, without the third state of phase shift (voltage regulation). This is where attention needs to be paid. Therefore, the control circuit is different from the conventional phase shift control circuit and is relatively simple.
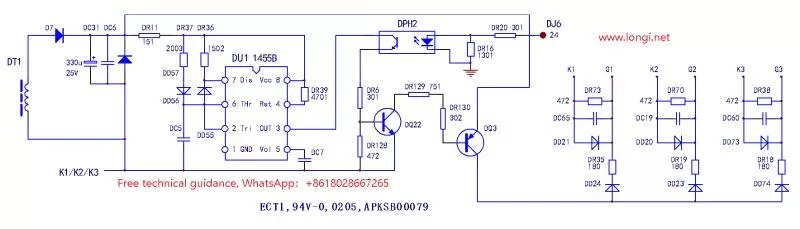
A slightly more complex thyristor control circuit, such as the trigger circuit of the Delta 37kW inverter thyristor, is shown in the figure below:
Figure 5: SCR trigger control circuit 2
After rectification and filtering by an independent power supply winding of the switching power supply, it is used as the power supply for the thyristor trigger circuit. The control circuit consists of the NE555 time base circuit, the DPH2, DQ22, DQ3 trigger pulse on/off circuit, and the D and R three-way trigger flow circuit. After the switching power supply works, the NE555 time base circuit is connected to a multi-resonance oscillator and is powered on. Whether the oscillation pulse output from pin 3 is sent to the three trigger circuits of the subsequent stage depends on the command control of the CPU. The command signal of the CPU is introduced to the input side of the photocoupler DPH2 through the 24th pin of the control wiring terminal DJ8. When the transistor on the output side of the optocoupler is turned on, the pulse signal of the NE555 oscillator is sent to the D and R trigger circuit loop of the subsequent stage through the transistors DQ22 and DQ3. After the CPU issues the thyristor opening command, the three devices DPH2, DQ22, and DQ3 are always in the on state, and the trigger pulse is always added to the G and K of the three thyristors. The peak trigger current is about 100mA.
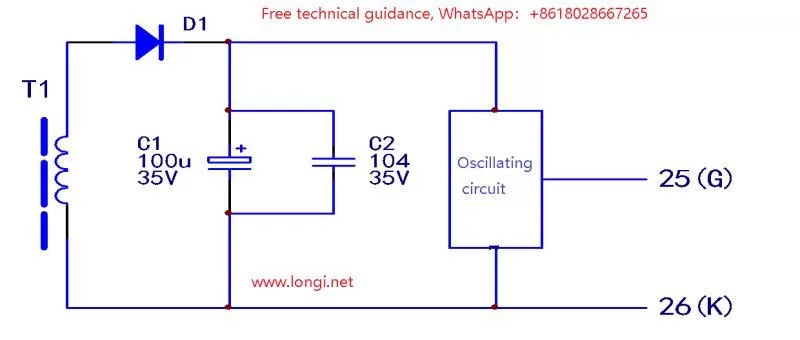
In addition, in the Panasonic and Fuji small power inverter models, another form of main circuit structure is used to complete the initial charging control of the main circuit capacitor. This is the internal circuit structure diagram of the 7MBR35SD120 integrated power module. The circuit is shown in Figure 6:
The difference of the circuit is that a controllable device is added after the three-phase rectifier bridge. A charging resistor must be connected in parallel to the terminals 21 and 26. After a certain charging voltage is established on the main circuit capacitor, a trigger current is input from terminals 25 and 26, then the thyristor is turned on and the inverter enters the standby working state.
The control circuit is generally powered by an independent 24V winding of the switching transformer to obtain control power with a “floating ground”. The control circuit is mostly an oscillation circuit, which increases the pulse trigger current of the thyristor device. The oscillation circuit is not a conventional phase-shift trigger circuit, but provides high-frequency/density random trigger pulses to put the thyristor in a fully conductive state. The thyristor here, under the action of high-density trigger impulses, is like a switch “turned to the on position”. There is no actual surveying circuit on hand for the trigger circuit of this model, so we can only draw a simple diagram based on the circuit structure for reference.
Figure 6: 7MBR35SD120 integrated power module
Figure 7: thyristor trigger circuit of 7MBR35SD120S module
1. The difference between various types of driver ICs:
The core component of the inverter drive circuit is the driver IC, and the commonly used models are TLP250, A3120, PC923, PC929, A316J, etc. The driver IC is essentially a type of optocoupler device. The purpose of using optocouplers is to achieve isolation of different power supply circuits on the input and output sides of the coupling, and to ensure that the output side has a certain power driving capability, which has both electrical isolation and power amplification.
Ordinary four-wire end optocoupler devices, such as PC817, have an internal circuit consisting of an input light-emitting diode and an output photosensitive transistor. After the input current (typical application value 5-10mA) is passed through the input side , the output side transistor generates excited photoelectrons and conducts. This type of optocoupler is mainly used for the transmission of switching signals, such as the digital signal control terminal of the inverter.
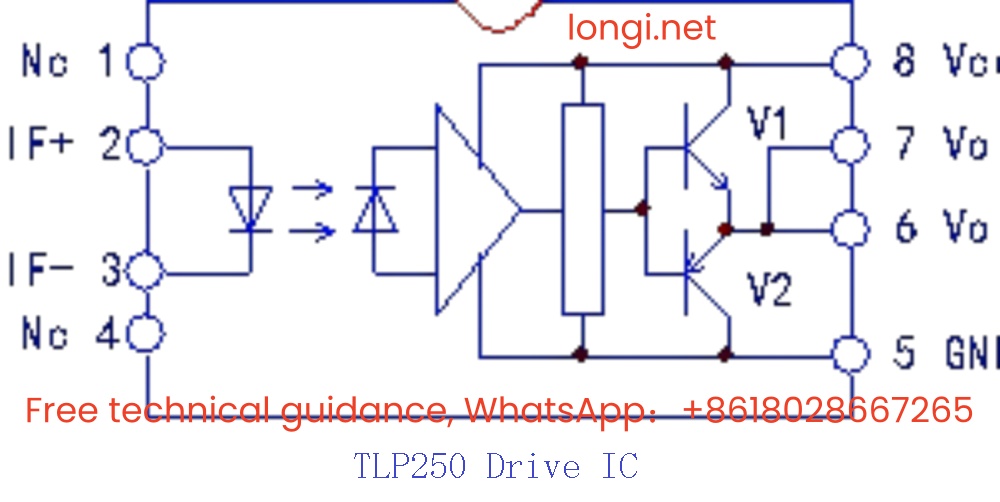
As an optocoupler device of the driver IC, its structure is slightly more complicated than that of PC817. The output stage is mostly composed of emitter output to the complementary amplifier, such as TLP250, A3120, PC923, etc. The output stage is composed of two-stage emitter complementary circuits, V1 and V2. When V1 is turned on, the VCC positive supply voltage is added to the gate-emitter junction of the IGBT through the output pins 6 and 7, providing the driving current for the IGBT to turn on. If the gate-emitter junction of the IGBT is regarded as a capacitor, the V1 conduction provides the charging current of the gate-emitter junction capacitor of the IGBT to turn it on; and when V2 is turned on, the output pins 6 and 7 are pulled to the GND ground level or the negative supply voltage, providing a charge discharge channel for the gate-emitter junction capacitor of the driven IGBT, so that it is quickly cut off. During work, V1 and V2 are alternately turned on to implement the on and off control of the IGBT. It should be noted that the power supply for this drive circuit often uses a positive and negative dual power supply of +15V and -7.5V to enhance its control ability.
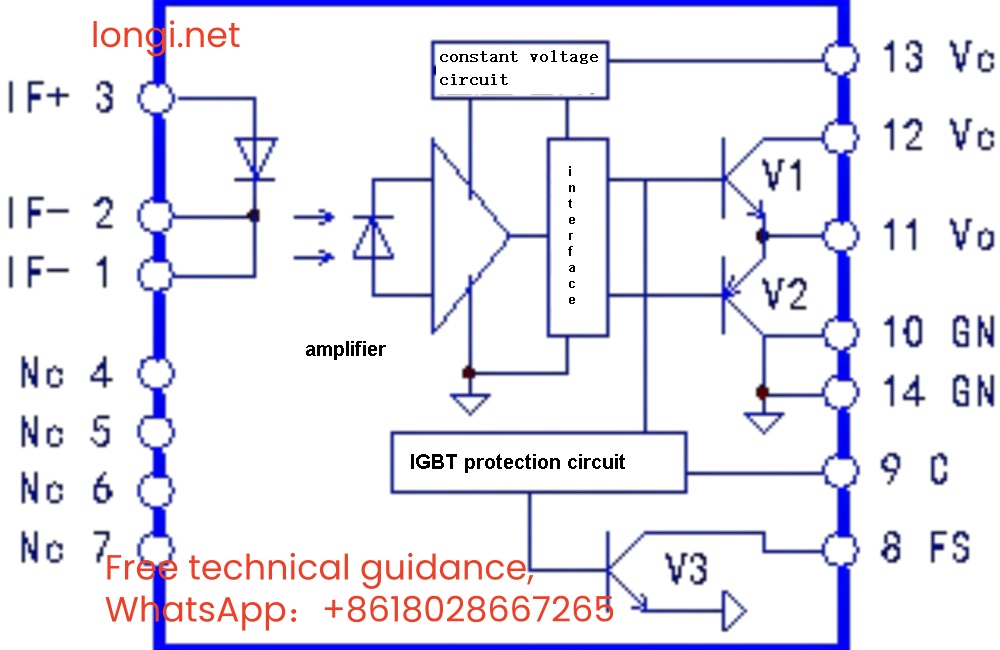
PC929 adds IGBT protection circuit, also known as IGBT conduction tube voltage drop detection circuit, based on the circuit structure of TLP250, A3120, PC923, etc., which is mainly responsible for the rapid protection of IGBT from overcurrent and short circuit. As we all know, in the U, V, W output circuit of the inverter, two or three current transformers are connected in series (the current signal is collected by the Hall element and processed by the amplification circuit), and the output signals are processed into analog and switch signals by the back-stage circuit respectively, and sent to the CPU for current display, output control, automatic speed control and current limiting control and overload protection during startup and operation. However, the current transformer circuit often has a large time constant and cannot implement μs -level rapid protection for IGBT. In fact, the implementation of overload and short circuit protection for IGBT depends on driver ICs such as PC929 and A316J to a certain extent.
Because the tube voltage drop when the IGBT is turned on actually reflects the working state of the IGBT, the overcurrent detection of the IGBT can be implemented by using the IGBT’s energy-conducting tube voltage drop signal, which can effectively implement the rapid overcurrent protection of the IGBT. The IGBT tube is an organic combination of a two-stage device and a field-effect device. The collector and the emitter form an output current path and have a certain conduction internal resistance. When the IGBT works within the rated current, the normal conduction tube voltage drop should be less than 3V. When the overcurrent is nearly 2 times, the overload current forms a large voltage drop on its conduction internal resistance, causing the tube voltage drop to rise to about 7V. Since the overload capacity of electronic devices is poor, the overload time allowed is short, and the faster the protection action, the better. Detecting the IGBT’s conduction tube voltage drop signal to cut off and protect the IGBT has become the most effective and widely used method in the inverter drive circuit.
Compared with PC923, PC929 (pictured above) has an additional IGBT protection circuit. Pin 9 is connected to the C and E poles of the driven IGBT together with the external components to detect the IGBT conduction tube voltage drop signal. When the tube voltage drop signal rises to above 7V due to overcurrent, the internal triode V3 of pin 8 is turned on, and the OC and SC signals are isolated by the external optical coupler and sent to the CPU. The inverter reports the OC signal and shuts down for protection. (For details, please refer to the article “Repair of PC923 and PC929 drive circuits”)
However, it can be seen from the circuit structure of PC929 that V3 of the OC alarm circuit is directly electrically connected to the output side circuit, which is the strong current side. The OC signal can only be sent to the CPU through optocoupler isolation. Assuming that the optocoupler that transmits the OC signal is also integrated into the driver IC, the OC signal output pin of the driver IC can be directly connected to the CPU pin. Then the A316J in the driver IC can complete this task.
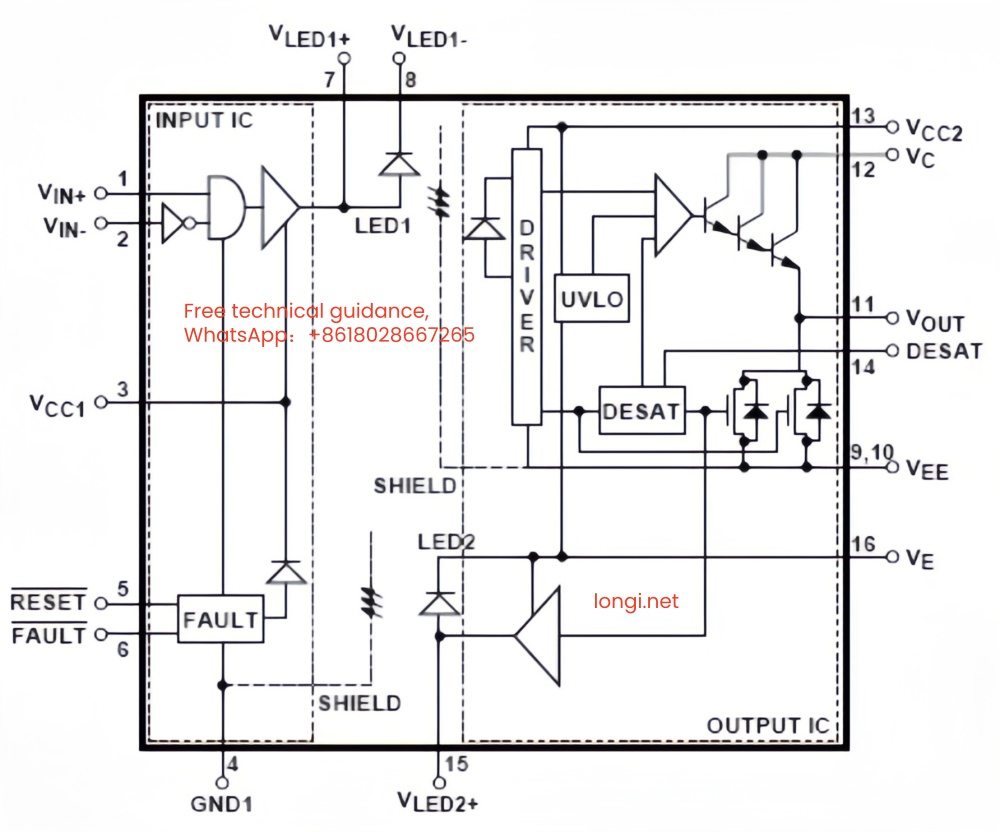
The internal circuit structure of A316 is shown in the figure below. The PWM pulse signal from the CPU is input through pins 1 and 2, isolated by the internal photocoupler LED1, the interface circuit and the power output circuit, and output from pin 11 to drive the IGBT; the external components at pins 14 and 16 and the internal circuit constitute the IGBT tube voltage drop detection circuit. When the IGBT protection circuit is activated, the LED2 photocoupler transmits the OC signal to the input side, which is output from pin 6 and sent to the CPU.
Compared with other driver ICs, A316J has the following two features:
(1) The input side is not a light-emitting diode, but a digital gate circuit. It does not need to draw a large original drive circuit from the signal source. The input impedance is high and it is easy to connect directly to the CPU pin, eliminating the intermediate drive circuit link.
(2) After the OC signal fault occurs, there is a fault lock function, which blocks the transmission of the pulse signal. Only after a low-level reset signal is input from pin 5, can the fault lock state be released and the pulse transmission path be opened. Therefore, A316J also has a fault reset function.
In this sense, A316 is an integrated driver IC with the most complete control functions.
2. Methods for removing OC fault alarm
During maintenance, we often need to disconnect the drive circuit from the main circuit for separate inspection. At this time, the OC fault alarm function of the drive circuit will cause us a little trouble. When the drive board is powered on separately, the operation panel often reports an OC fault, making it impossible for us to detect whether the drive circuit is normal.
It is necessary to take corresponding measures to release the OC fault alarm function of the drive circuit to facilitate the inspection of whether the drive circuit can transmit six-channel drive pulses normally.
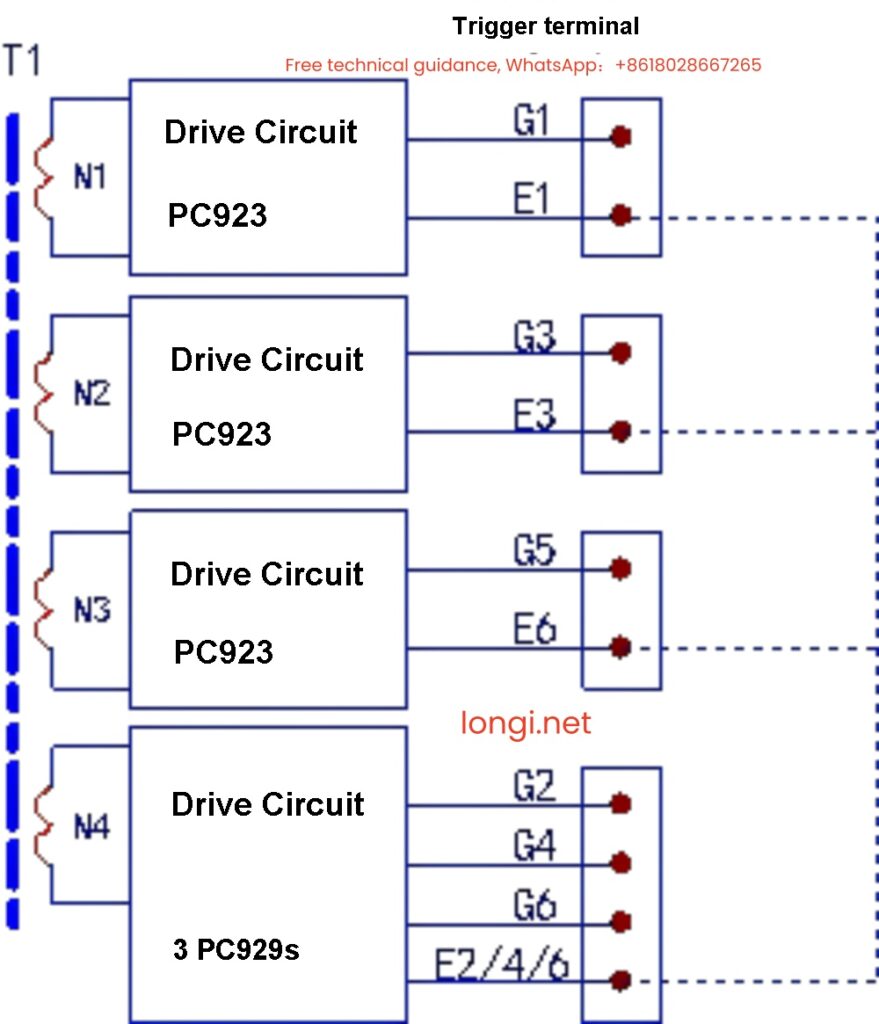
In the drive circuit, PC923 and PC929 often appear in pairs, and PC929 is responsible for detecting the voltage drop of the lower three-arm IGBT conduction tube, and reports the OC signal to the CPU when a fault occurs. When the drive board is disconnected from the main circuit IGBT, it is equivalent to the IGBT open circuit. Once the start signal is sent, PC929 will send an OC signal to the CPU.
pulse trigger terminals E1 – E6 (dashed lines in the figure below) to artificially create the false appearance of “normal opening” of the three-arm IGBT in the inverter circuit. PC929 no longer returns OC signal to the CPU, so the CPU outputs six pulse signals to six driver ICs, so that you can check whether the drive circuit is normal.
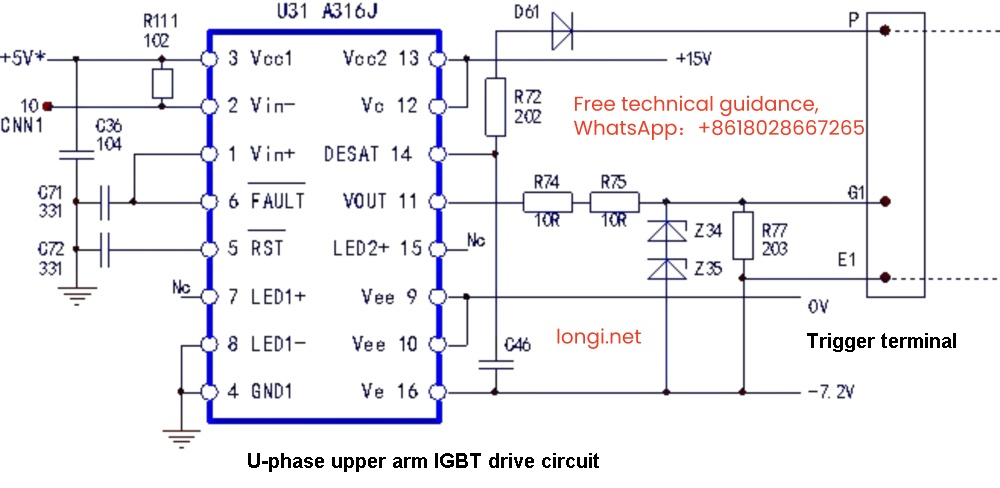
The A316J driver IC can also detect the voltage drop of the upper three-arm IGBT and report the OC signal. See the figure below:
By short-circuiting the trigger terminals P and E1, the “conditions” for turning on the IGBT are artificially created, thus releasing the OC fault detection and alarm function of A316J.
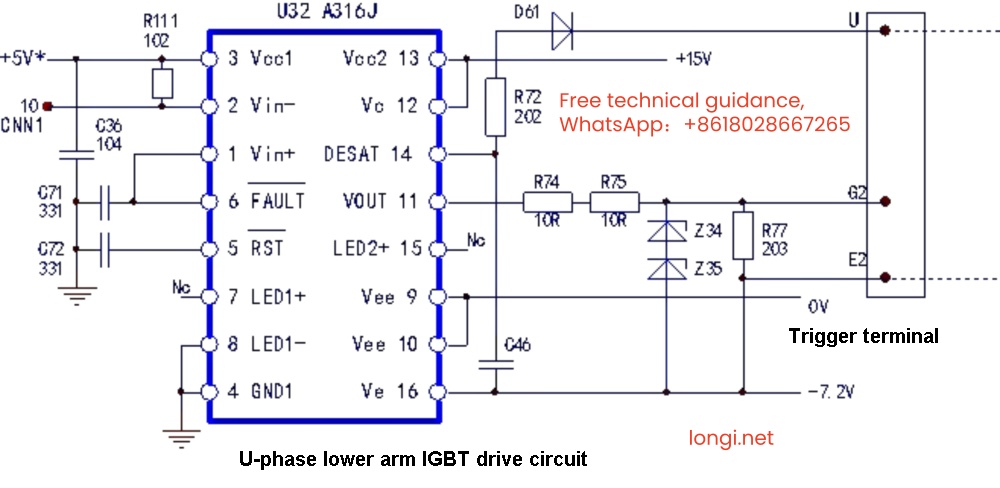
The method of removing the OC alarm function of the three-arm IGBT drive circuit of A316J is the same as above. See the figure below:
The driving circuit of the U-phase lower arm IGBT can short-circuit the U and E2 contact terminals, thereby releasing the IGBT tube voltage drop detection and OC signal alarm functions.
There are two points to note:
(1)For the detection of the voltage drop of the lower three arms or the lower three arms IGBT tubes separately, the trigger terminals of the upper three arms or the lower three arms can be short-circuited to release the OC alarm function. For the detection of the voltage drop of all six IGBT tubes, only the trigger terminals of the upper three arms IGBT can be short-circuited, and the OC alarm of the lower three arms can only be released by using a fine needle to pick up the 6th pin of A316; after checking that there is no problem with the upper three-arm drive circuit, remove the short-circuit line, pick up the 6th pin of the upper three-arm drive IC, short-circuit the trigger terminal of the lower three-arm drive circuit, and check whether the lower three-arm drive circuit is normal;
(2)If the trigger terminal has two pins, only G2 and E2, you should find the cathode of diode D61 from the 14 peripheral circuit of A314J, short-circuit it with E2, and release the OC alarm function.
Most of the maintenance of the inverter is the maintenance of the drive circuit. After the drive circuit is repaired, the power-on test of the inverter circuit must be cautious! ! You should use measures such as series light bulbs, 2A fuses, and DC low voltage. After confirming that the inverter circuit is fault-free, restore the 530V DC power supply.
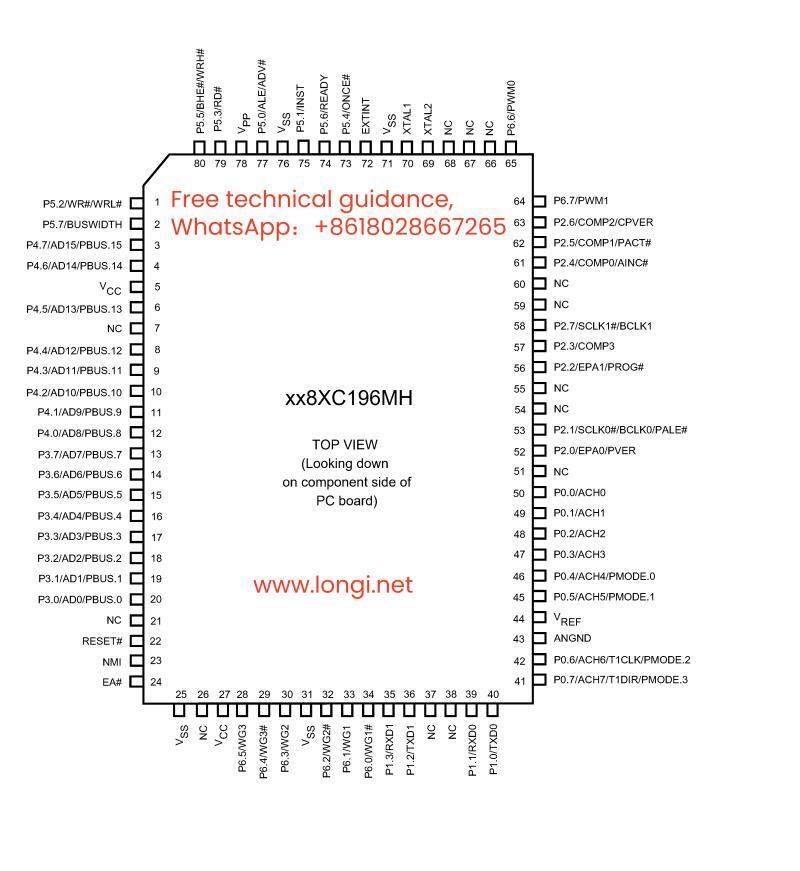
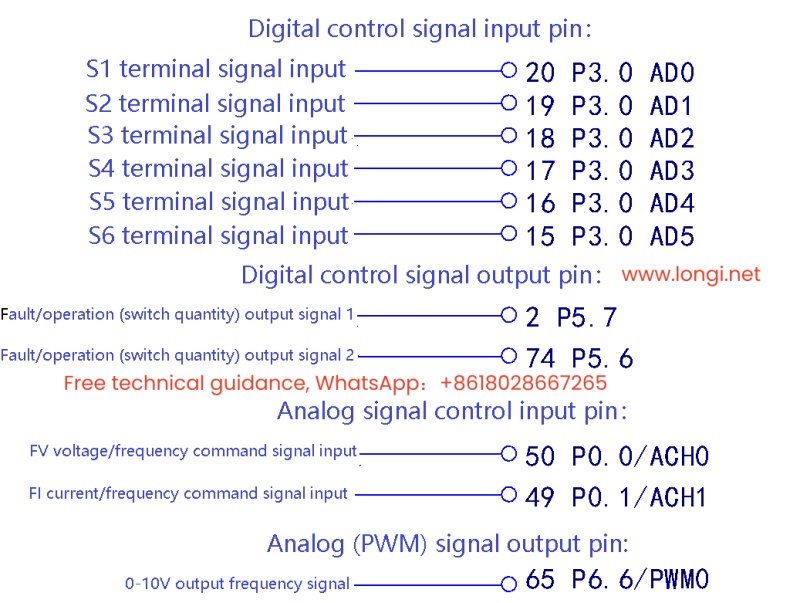
1. Pinout of the 80-pin S87C196MH (MC) microcontroller in SMD package:
2. Introduction to the structure and functions of the S87C196MH (MC) microcontroller:
The controller is a 16-bit microcontroller produced by Intel. It is widely used in inverter products due to its powerful functions and high versatility.
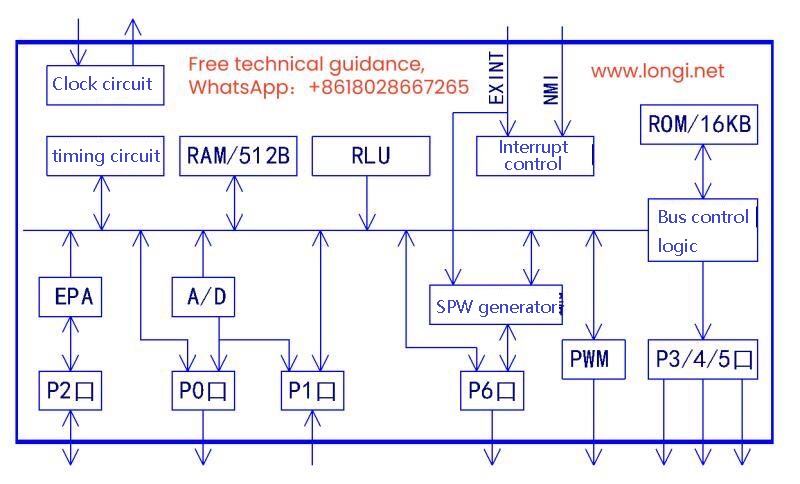
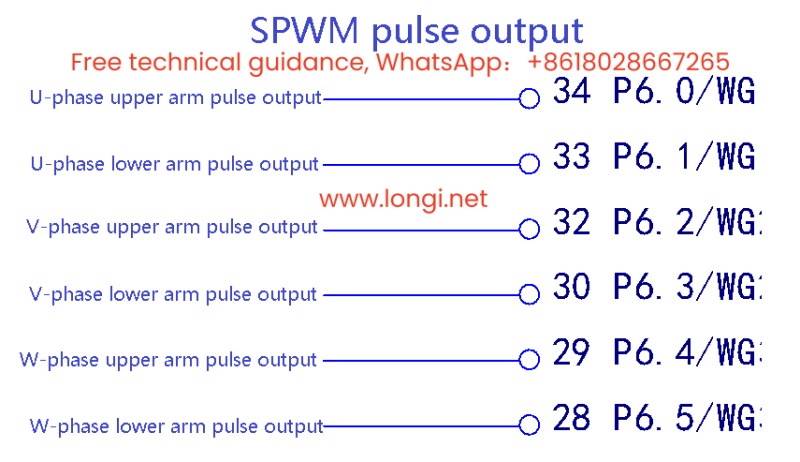
The internal circuit includes arithmetic logic unit (RLU), registers, internal A/D converter, PWM generator, event processing array (EPA), three-phase to complement SPWM output generator, watchdog, clock and interrupt control circuits, etc. The internal structure schematic is as follows:
The S87C196MH (MC) microcontroller uses CHMOS technology, has an operating temperature of -40 º C–85 º C, supports 16KB EPROM, and when the crystal oscillation frequency is 16MHz, it only takes 1.75 μs to complete 16-bit by 16-bit multiplication . It is suitable for the rapidity requirements of the control system. There are 7 I/O ports, and each port pin is multifunctional.
The register array has 512B, which is divided into low 256B and high 256B. The low 256B can be used as 256 accumulators during ALU operation, and the high 256B is used as register RAM. The high 256B can also be switched to 256B with accumulator function through unique window technology. The microcontroller has 13 10-bit/8-bit high-speed A/D converters inside, and the conversion time can be set between 1.39-40.2 μs . The A/D can also be used as a programmable comparator to generate an interrupt when the input crosses a threshold level.
The event processing array (EPA) mainly performs input and output functions. In input mode, the EPA monitors the changes in the input pin signal and records its time value when the event occurs. This process is called capture. In output mode, when the timer matches a stored time value, the output pin is set, cleared or triggered. Both capture and compare events can generate normal service processes or interrupts. There are 4 capture/compare modules and 4 compare modules.
EPA also contains two 16-bit bidirectional timer/counters T1 and T2. T1 can be timed according to an external clock source. In this working mode, EPA can directly process two pulse signals with a 90 ° phase difference output by the position sensor (such as a photoelectric encoder) to monitor the speed and direction of the motor.
External event processing server (PTS). The controller has two types of interrupt systems: programmable interrupt controller and PTS. The programmable interrupt can be set to PTS interrupt service mode. PTS has several micro-instruction coded hardware interrupt service processes, which can work in parallel with the CPU and can complete data block transfer, process multi-channel A/D conversion, control serial communication and other functions.
The S87C196MH (MC) microcontroller has a three-phase complementary SPWM waveform generator built in, which directly outputs six SPWM signals through the P6 port. The driving current can reach 20 mA and the driving frequency can reach 8MHz. Each SPWM signal can be independently programmed and the dead zone interlock time can be set.
3. Application of S87C196MH (MC) in INVT inverter motherboard:
(1) Power supply, clock, reset, etc. Pins that meet the basic working conditions of the microcontroller.
(2) Pins for processing digital and analog signals at the control terminals. The start, stop and speed control of the inverter, as well as the monitoring of the working status, are all carried out through the control terminals. The input and output signals of the control terminals directly enter the microcontroller pins.
The output of the analog signal of the inverter control terminal actually comes from the PWM0 (P6 I/O port) pin of the microcontroller. The actual output is a width-modulated pulse signal, which is converted into an analog voltage signal by the subsequent circuit.
(3)Switching control signal, control of charging contactor (relay control), control of cooling fan and reset control of drive circuit (release its fault lock state).
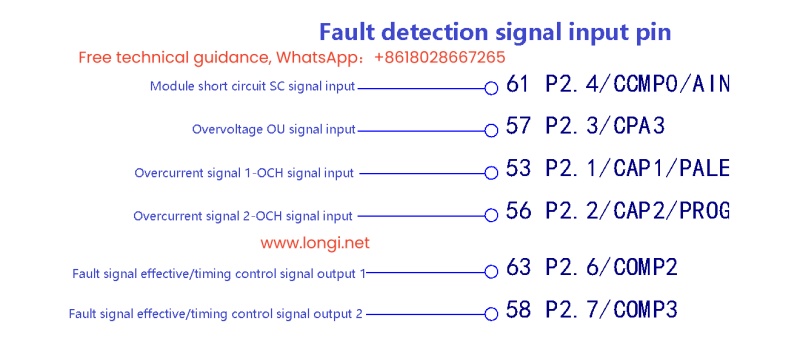
(5)Processing of various detection and protection signals:
(6) Processing of other functional pins
Some pins are connected to ground, +5V, or +5V via a pull-up resistor according to their functions. Some pins are left unused.
The specific functions of each pin of the S87C196MH (MC) microcontroller have been explained in detail above. In troubleshooting, the cause of the fault can also be determined and the fault location can be found based on the level status of the relevant pins.
For example, if the signal input of a certain terminal of the inverter is invalid, measure whether there is a 0-5V voltage change on the corresponding pin of the CPU , and then quickly determine whether it is a terminal input circuit fault or a CPU fault.
A set of hydraulic processing equipment in a factory suddenly broke down. A solenoid valve could not be powered, causing the hydraulic system to not work properly. After receiving a notice from the user requesting on-site maintenance, an intern from a mechanical and electrical technical school and an undergraduate majoring in automation set out to do the work.
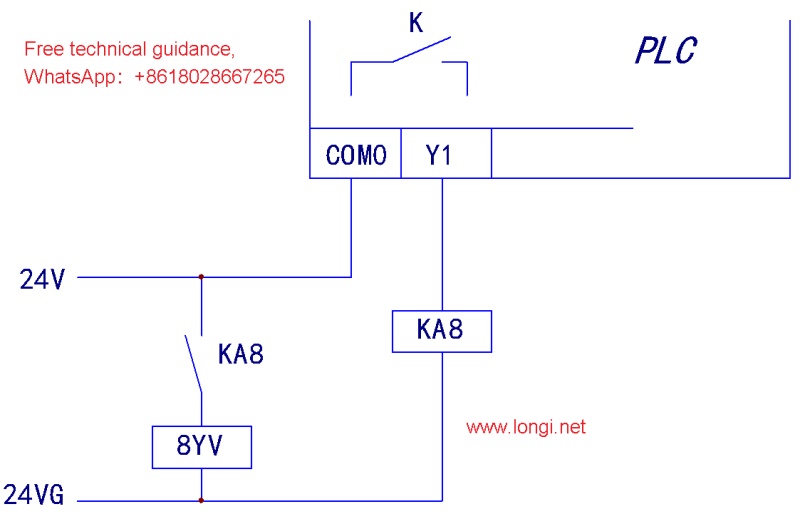
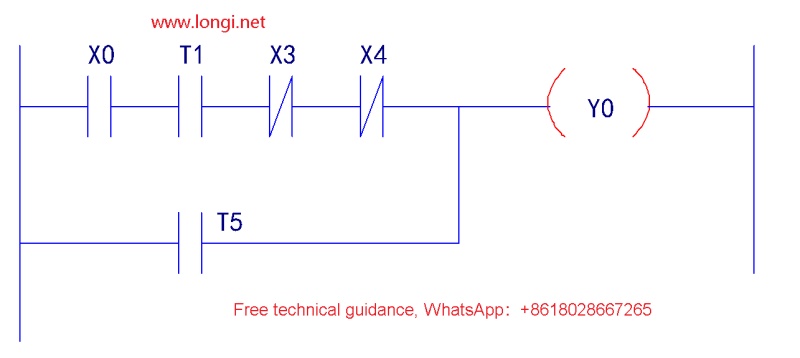
The hydraulic station is controlled by 8 solenoid valves, which are powered by 24V DC and automatically controlled by PLC according to the process flow. Two interns circled the hydraulic system and PLC electric control cabinet for several times, and measured the normal resistance of the solenoid valve (labeled 8YV) coil, which was about tens of Ω . They judged that the solenoid valve was good, and asked the operator to operate the electric control cabinet. The other seven solenoid valves could work normally. However, the two ends of the 8YV coil could not get voltage and could not be attracted. The two interns roughly checked the circuit. The output contact of the PLC drives the intermediate relay KA8, which controls the action of the solenoid valve. The circuit is as shown below:
The circuit was basically clear, but the two students were confused about whether the fault was a PLC problem, an intermediate relay problem, or a circuit problem. In other words, how to check the PLC peripheral circuit fault when the machine was stopped. They wanted to measure the fault during the operation of the equipment, but they did not understand the equipment control process and were afraid of damaging the equipment, so they did not dare to operate. They were not sure whether it was a PLC or a PLC peripheral circuit problem. They did not know how to check it when the machine was stopped. After tinkering for an hour or two, they did not find any results and felt that their self-confidence had suffered a not-so-small blow.
The factory owner was a little anxious. If the repair was not done, the customer order would not be completed. He quickly called two veteran electricians and asked them to repair the equipment in a short time. The veteran electrician, Master Zhang, came up and scolded the two students: If the solenoid valve does not work, there are only two wires, just follow them and find the problem. How can it not be repaired? ! He asked the two students, have you learned PLC, have you learned control circuits? Both of them answered that they had learned PLC and control circuits. The two felt that they had learned well at that time, and one of them was in the top three in the class, a top student. The student said that he understood what he learned at that time, from the control principle to the circuit, everything was OK. How come it is useless all of a sudden? It is exactly: feeling high-energy in learning, but very low-energy in practice; academic performance is not bad, but it is not good when it comes to reality.
Master Zhang said, “Let me fix it while you watch. How difficult is it?” Master Zhang found a wire and introduced the 24V voltage directly to the two control leads of 8YV. He saw that the 8YV solenoid valve still did not work, and the lead was indeed broken. Master Zhang said, “Replace the wires. Replace the two leads of the solenoid valve, and it will be fixed. It’s very simple!”
The control line from the electric control cabinet was introduced into the workshop hydraulic station through dozens of meters of buried iron pipes. Master Zhang said, I know, there is a joint in the control line, it must be a bad contact. To repair it quickly, re-route two control leads of the 8YV solenoid valve, and solve the problem in ten minutes! A student asked: Do I need to measure it again? Master Zhang said, there is no need to measure, didn’t I just try it? In addition, two wires were pulled from the control terminal of the electric control cabinet and directly connected to 8YA. The power-on test, just as Master Zhang said, within ten minutes, the fault was eliminated.
At this time, the two students’ interest in learning was aroused, and they asked the old electrician Master Li: If you were asked to repair this fault, what would you do? Master Li was gentle and explained slowly: Master Zhang’s repair method is based on experience, and his inspection method is also more accurate and direct. He is familiar with the circuit of this equipment and can often solve the problem in a few minutes. You can’t reach this level in a short time. I rely on multimeter measurement, and after several inspection methods and steps, I find out the fault and solve the problem. My method is slower, but more universal and can be used anywhere. In fact, my method is more professional and classic.
What method do you use? The two students are getting impatient.
Master Li said: According to this fault situation, I should first turn off the control power supply of the electric control cabinet and measure the resistance of the two-wire terminal of 8YA from the control terminal. It is tens of Ω , indicating that the lead wire and the solenoid valve coil are basically normal. In fact, this measurement also found that the control lead wire of 8YA was broken, and the fault can be repaired by replacing the lead wire.
Student asked: If the lead wire and coil are good, why doesn’t 8YV work?
Master Li said: Next, we should check the peripheral control circuit at the PLC output end.
Master Li said: Find the two output control terminals YO and COM0 of the PLC. In fact, there is a normally open contact of a relay inside the two terminals. To put it simply, the PLC control terminal is a small switch. When the switch is closed, relay KA8 is energized, connecting the power supply of the 8YV coil and the solenoid valve is activated, right?
We can first short-circuit the two terminals YO and COM0 to observe whether KA8 works. If KA8 works normally but 8YV does not work, and then short-circuit the normally open control contacts of KA8, 8YA works normally, it means that KA8 is broken and the normally open contacts are in poor contact. If the two terminals YO and COM0 are short-circuited, the solenoid valve 8YV works normally, which means that the PLC output peripheral circuit is good. If the terminals YO and COM0 are short-circuited and KA8 does not work, check the 24V control power supply and leads.
Of course, on the electrical control cabinet side, you can short-circuit the YO and COM0 terminals and measure the 8YV terminal to see if there is 24V voltage to determine whether the PLC peripheral control circuit is normal.
In this way, by short-circuiting the two switch points, even if the fault of the PLC peripheral control circuit is exposed, it is not necessary to check the fault during the operation of the equipment. You have to find a way to change the normal state of the circuit, make it move, and expose the fault.
What if the PLC peripheral control circuit is fine, but the 8YV still doesn’t work? Two students asked.
Master Li explained slowly as usual: This may be a problem with the PLC and PLC input signal.
How to check it? The student asked again.
Master Li said: We need to let the operator try it out.
During operation, please pay attention. If the indicator light of the YO terminal can light up, but KA8 does not attract, it means that the contact of the internal relay of the PLC is poor. The PLC should be repaired or replaced. As shown in the circuit above, when the output indicator light of the Y0 terminal is on, you can measure that the voltage between the two terminals of YO and COM0 is 0V, indicating that the internal switch is connected; when the light is off, the voltage is 24V, indicating that the internal switch is disconnected. If the output indicator light of the Y0 terminal is on, but the voltage is still 24V, the contact of the internal relay of the PLC must be damaged.
During the operation, the output indicator light of the Y0 terminal is always off. When the PLC program is running normally (such as other controls are normal in this example), it may be that the signal of the PLC input terminal is not input normally, or the state is wrong, and the conditions of YO output cannot be met. At this time, you can use a laptop to call up the PLC internal program, monitor the program running, find out the conditions that meet the Y0 output and various conditions, and then find out which input signal is abnormal, such as poor contact of the normally closed point of the external limit switch, etc., and the fault can be eliminated.
In the figure above, XO, T1, X3, X4, and T5 can all be called conditional contacts of YO. Let’s ignore T5 for now. For the control of YO, only when the XO (input condition) and T1 (after the delay time is up) contacts are connected, and the X3 and X4 contacts remain static, can YO meet the conditions for powering on. Find out which of these four contacts is not met, find the cause of the fault, and then repair it. If you check that the status of the X0, X3, and X4 contacts are all correct, and look at the PLC input terminal status indicator, X0 is on, and X3 and X4 are off, then three of the four conditions have been met, and only the T1 condition is not met. Further search for the control program segment for the T1 coil in the program, and then check the conditions for meeting the power-on condition of T1, step by step, and find the cause of the fault.
The external input signal of PLC, such as limit switch, may be installed in a place that is not easy for us to touch. Its closing and opening are not easy to operate. At this time, you can also take the method of short-circuiting YO and COM0 terminals, artificially short-circuiting the PLC input terminals, forming an input signal, satisfying the YO power-on condition, and finding out the fault. For example, short-circuit X0 and COM terminals to see if the input indicator light is on and whether the output is moving. If the input terminal status indicator light is not on, check the input terminal 24V power supply is normal, then the internal input circuit of PLC is broken.
During the maintenance process, do not forget to communicate with the operator and electrician in a timely manner. They are familiar with the operation process. You may have searched for a long time, but they may not be able to tell you the fault with just one word of reminder. For example, they mentioned that YO can only act after Y1 output delays for 10 seconds, which makes you understand that YO can only act after Y1 acts. As a result, the problem is found in the control circuit of Y1. This can greatly improve the maintenance efficiency.
When Master Li finished speaking, the two students were convinced and felt that this job was not that difficult. They were full of confidence. They learned things that they could not learn in school from this maintenance example and from the two old electricians. They felt that they had gained a lot. They felt that if the teachers who led the internship class could teach like Master Li, they would be very lucky.